航行システムとレーダーサービス
基礎知識
このレッスンでは、ATCが提供する航行システムとレーダーサービスに関連する要素を紹介します。現在使用されているさまざまな航行システムと、レーダー範囲および通信が確立されているときにATCが提供するレーダーサービスについて説明します。航行システムを適切に使用するには、ステムの機能を理解することが重要です。
VOR/VORTAC (Very High Frequency Omnidirectional Range):超短波全方向式無線標識
3種類のVOR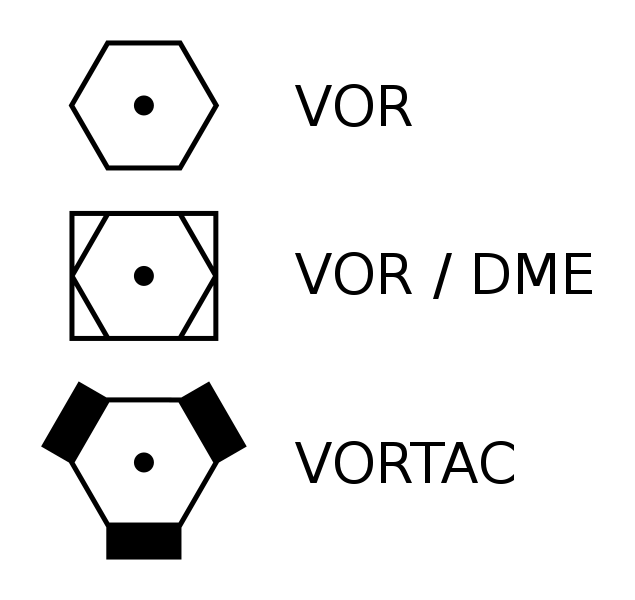
- VOR – VOR自体は、ステーションに対する磁気方位情報を提供する
- VOR / DME – DME(距離測定装置)もVORとともに装備されている場合
- VORTAC –戦術航法装置(TACAN)がVORとともに装備されている場合
- DMEは常にVORTACの一部機能である
どのようにして動作するのか
- オムニ(Omni)とは「すべて」を意味する
- 全方向式範囲とは、ステーションから全方向に直線コース(またはラジアル)を投影するVHF無線送信地上局のことである
- 自転車の車輪を思い浮かべる際、中心にあるハブから外側にのびていくスポークに似ている
- 全方向式範囲とは、ステーションから全方向に直線コース(またはラジアル)を投影するVHF無線送信地上局のことである
- ラジアルが投影される距離は、送信機の出力に依存する
- 投影されたラジアルは磁北を基準にして測られる
- ラジアルは、VORステーションから外側に向かってのびる磁気ベアリングの直線として定義される
- ラジアルとのコースアラインメント精度は優れているとみなされている(±1°以内)
- VOR地上局は、108.0〜117.95 MHzのVHF周波数帯域内で送信する
- 機器はVHFであるため、送信される信号は見通し内(line-of-sight)の制限を受ける
- 範囲は受信機器の高度に正比例して変化する
- 機器はVHFであるため、送信される信号は見通し内(line-of-sight)の制限を受ける
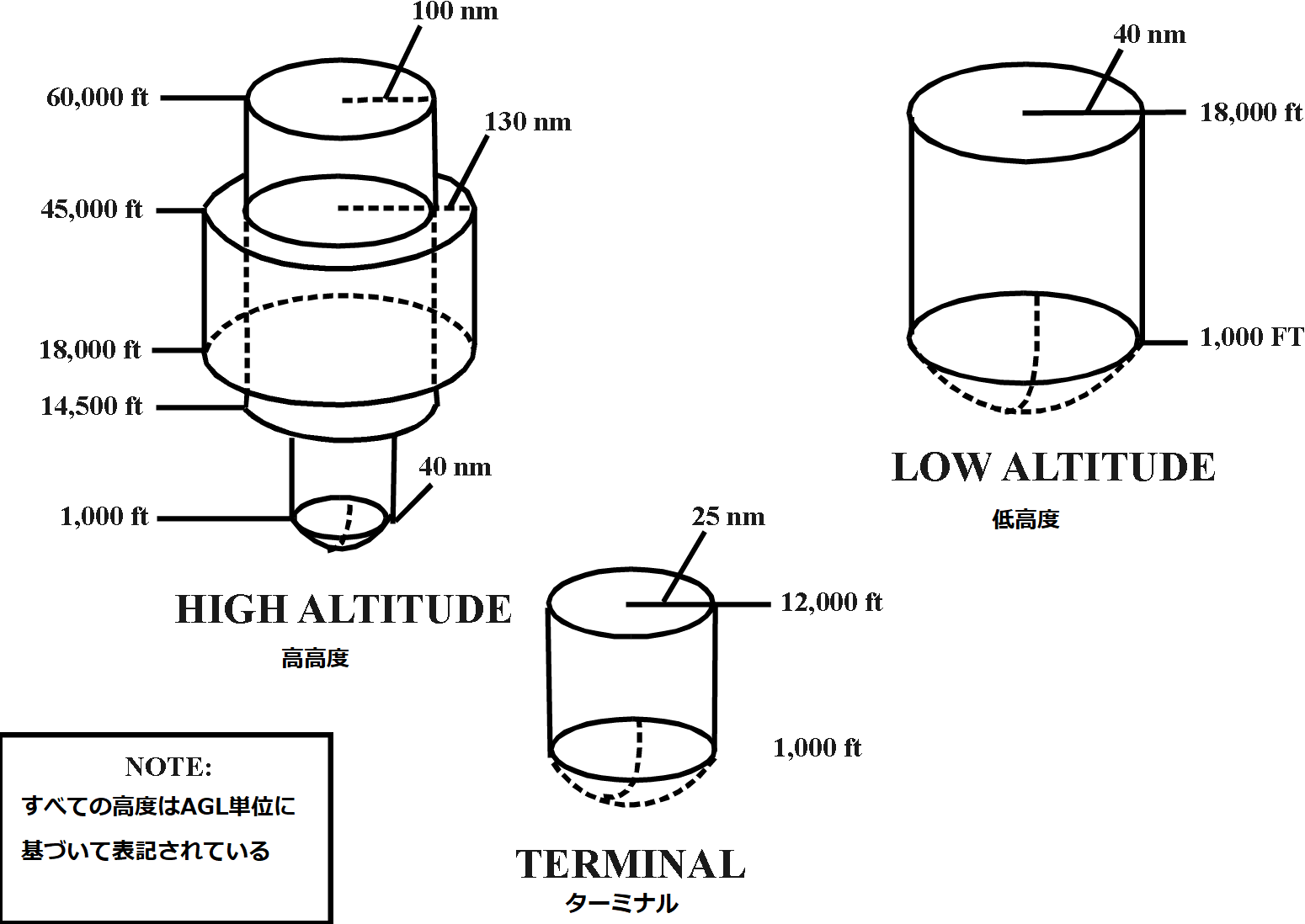
VORクラス
- 運用上の用途に従って分類され、有用な範囲に基づいている
- T (Terminal ターミナル); L (Low Altitude 低高度); H (High Altitude 高高度)
VORチェック
- 正確なVORレシーバーを維持するためには、定期的なチェックとキャリブレーション(校正)が必要である
- VFR飛行に対する規制はない
- チェック(チェックポイントはチャートの補足にリスト化されている)
- FAA VORテスト機能(VOT)
- 認定の空中チェックポイント
- 空港地表面にある認定の地上チェックポイント
- デュアルVORチェック
- 機器が受信するVORラジアルが、ステーションが送信するラジアルと整列していることを確認する
- 必要なIFR許容値は、地上チェックの場合は±4°、空中チェックの場合は±6°である
VORの使用
- VORの識別
- ステーションはモールス信号または、VOR局名称の音声案内によって識別される
- VORが使用できない場合、信号化されたIDは削除され、送信されない
- 航行には使用しないこと
- VOR受信機には、信号強度が不十分な場合、それを通知するアラームフラグがある
- 機体が遠すぎるか低すぎるかのいずれかであり、送信信号の見通し外範囲外にある
- VOR無線航行には2つの必須要素がある
- 地上送信機と受信機
- 地上送信機は地上の特定の位置にあり、割り当てられた周波数で送信します
- 機体の機器には、チューニングデバイスを備えた受信機とVOR計器が含まれている
- 航行機器は以下で構成されています。
- コースセレクターと呼ばれるOBS(Omni Bearing Selector)
- CDI(コース偏差インジケーター)針
- To / Fromインジケーター
- 航行機器は以下で構成されています。
- 地上送信機と受信機
-
- コースセレクターは、回転させてラジアルを選択するタイプの方位角ダイヤルである
- さらに、ステーションへの磁気経路を決定することができる
- OBSが回転すると、CDIが移動して機体に対するラジアルの位置が表示される
- OBSを回転させてCDIを中央に配置すると、ラジアル(ステーションからの磁気コース)またはその逆(ステーションへの磁気コース)を見つけることができる
- 機体が選択したラジアル上にない場合、CDIも右または左に移動する
- コースセレクターは、回転させてラジアルを選択するタイプの方位角ダイヤルである
TO & FROM表示について
- 針を中央に置くことにより、コースの「FROM」または「TO」のいずれかのステーションが表示される
- フラグに「TO」と表示されており、コース上を飛行している場合、機体はステーションに向かっていることになる
- 「TO」フラグは、現在使用しているラジアルの±90°範囲内に機体が位置する場合に表示される
- 例:090°ラジアルを使用している場合、360-180°ラジアルはTOフラグを示し、もう残り半分はFromを示す
- 「FROM」が表示され、コースが続く場合、機体はステーションから離れ始めている
- 「TO」フラグは、現在使用しているラジアルの±90°範囲内に機体が位置する場合に表示される
- フラグに「TO」と表示されており、コース上を飛行している場合、機体はステーションに向かっていることになる
VORによるトラッキング(追跡)
- VOR周波数を調整し、識別子(モールス符号)をチェックして、目的のVORが受信されていることを確認すること
- OBSを回転させて、 「TO」表示でCDIを中央に配置する
- 「FROM」の表示で中央に配置されている場合は、180度回転させる
- Fromは現在のラジアルを示し、TOはステーションを示す
- VOR方位角ダイヤルまたはコースセレクターに示されている機首方位に旋回する
- これは無風の状況においては、ステーションを直接追跡する
- 横風があり、機首方位が維持されている場合、コースから外れていく
- 横風が右からの場合、飛行機はもちろん左側へドリフトする
- そのためCDIは徐々に右に移動する
- 目的のラジアルに戻るには、機首方位を右側に変更させる必要がある
- 機体が目的のラジアル上に戻ると、針はふたたび中央に戻る
- 中央に配置されたとき、飛行機は選択されたコース上にあり、今度は機体が風向きに対して修正が加えられている必要がある(もちろん右側に)
- これにより風補正が確立される(必要な量は風の強さに依存する)
-
- 試行錯誤は、希望のトラックを維持するために必要な機首方位を得ることに繋がる
- GPSを持っている場合は、機体のトラック情報を使用して、目的のコースを追跡しているか否かを判断する(これにより、上記のような試行錯誤がなくなる)
-
- これにより風補正が確立される(必要な量は風の強さに依存する)
- 横風が右からの場合、飛行機はもちろん左側へドリフトする
- 到着し、VORステーションを通過すると、「TO」の表示が「FROM」の表示に変わる
- 一般に、アウトバウンドをインバウンドとして追跡する場合にも同じ手順が適用される
- 同じ機首方位で飛び続けることが目的の場合、コースセレクターは変更しないこと
- 別のコースでアウトバウンドを追跡する場合は、新しいコースをセレクターに設定する必要がある
- このコースに合流し、上記説明と同様に追跡する
- 一般に、アウトバウンドをインバウンドとして追跡する場合にも同じ手順が適用される
リバースセンシング
FROM指示でVORに向かって飛行している場合、CDIは本来あるべき方向と反対を指示する(これはHSIには適用されず、逆方向にはならない)
- もちろん、飛行機が右にドリフトする場合、針は右に移動するか、またはラジアルから遠ざかる
VOR使用時のヒント
- モールス符号または音声IDによってステーションを明確に識別する
- VOR信号は見通し線(line-of-sight)であることを忘れないこと
- TOに向かって航行するときに、インバウンドコースを決定して使用する
- ステーションに向かって飛行する際は常に、選択したコースをTO表示で飛行するように
- ステーションから離れるよう飛行する際は常に、選択したコースをFROM表示で飛行するように
衛星ベースの航行
- 衛星ベースのナビゲーションシステムには以下のものが含まれる、
- GPS(全地球測位システム)、WAAS(広域拡大システム)、LASS(ローカルエリア拡大システム)
GPS(Global Positioning System)
- GPSシステムは3つの主な要素で構成されている

- 宙域セグメント
- 地上から高度約11,000 NMにおいて31機の人工衛星によるネットワークで構成されている
- 米国は所有する機材のうち95%である24の運用衛星を維持することを約束している
- いつでも5つの衛星がすべての受信機の視野にあるように配置されている(操作に必要なのは4つ)
- 各衛星は約12時間で地球を周回する
- 非常に安定した原子時計を搭載し、独自のコード/ナビゲーションメッセージを送信
- UHF帯で放送される衛星(基本的には天候の影響を受けない)
- 見通し線(line-of-sight reference)の対象
- 航行に使用するには、(アンテナが)地平線より上にある必要がある
- 地上から高度約11,000 NMにおいて31機の人工衛星によるネットワークで構成されている
- 制御セグメント

- マスターコントロールステーション、5つのモニタリングステーション、3つの地上アンテナで構成される
- 監視ステーションと地上アンテナは地球の周りに配置され、継続的な監視と衛星との通信を可能にする
- 衛星が地上アンテナを通過すると、ナビゲーションメッセージブロードキャストの更新/修正がアップリンクされる
- 監視ステーションと地上アンテナは地球の周りに配置され、継続的な監視と衛星との通信を可能にする
- マスターコントロールステーション、5つのモニタリングステーション、3つの地上アンテナで構成される
- ユーザーセグメント
- GPSレシーバーに関連するすべてのコンポーネントで構成されている

- ポータブルハンドレシーバーから機体に搭載されるレシーバーまでの範囲をカバー
- 受信機は衛星からの信号を利用して以下の情報を提供:
- 位置座標、速度、およびユーザーへの正確な時間情報
- 位置情報の解決
- 受信機は、3Dフィックスを生成するために、最適に配置された少なくとも4つの衛星の信号を利用する
- 3D-緯度、経度、高度
- 衛星からの計算された距離/位置情報を使用して、受信機はその位置を計算する
- 受信機は、3Dフィックスを生成するために、最適に配置された少なくとも4つの衛星の信号を利用する
- GPSレシーバーに関連するすべてのコンポーネントで構成されている
航行
- GPSを使用したVFR航行は、目的地を選択してコースを追跡するのと同じくらい簡単である
- GPSトラッキング(追跡)
- コースの偏差は線形である-ウェイポイントに近づいても感度は向上しない
- GPSの使用はとても魅力的だが、これだけに依存するような飛び方は絶対に避けるように
- コースの偏差は線形である-ウェイポイントに近づいても感度は向上しない
WAAS(Wide Area Augmentation System)
- 精密アプローチで使用するためにGPS信号を補完する衛星ベースの補強システム
- 追加の地上局/静止衛星から送信された強化された情報で基本的なGPS衛星群の精度を増強
- 最悪の場合、WAASの精度は約25フィート-95%程度
- GPSと同様に、WAASにはスペース、コントロール、およびユーザーセグメントが含まれる
LAAS(Local-area augmentation system)
- 精密アプローチで使用するためにGPS信号を補完する衛星ベースの補強システム
- WAASと同様の機能だが、信号の修正/改善のために地上局により依存する
- WAASよりも費用対効果が低いと考えられている
- カテゴリーIII機器のアプローチを処理できると見なされる
レーダーサービス & 手順
- ATC施設は、参加可能なVFR航空機にワークロードが許す範囲でさまざまなサービスを提供する
- ATCと通信でき、有効範囲内にあり、レーダーを特定できる必要がある
提供されるサービス
VFRレーダートラフィックアドバイザリーサービス(飛行追跡)および安全警報 ベクタリング(要求された場合) ターミナルレーダープログラム(TRSA)–参加しているすべてのVFR航空機とIFRトラフィックを分離させる 位置を見失った航空機へのレーダー誘導支援 クラスCのサービスには、IFR / VFRならびに空港へのVFRトラフィックのシーケンスの分離が含まれる クラスBのサービスには、IFR、VFRおよび/または機体重量に基づく分離とVFR到着のシーケンスが含まれる
完成基準
訓練生は、さまざまな航行システムの操作と機体での実際の使用について理解しています。
成功のポイント
VORで航行し、ステーション(基地局)に向かう場合は、フラグが「TO」を示していることを確認し、指示されている見出しに従って飛行してください。 ステーションから離れてシグナルを追跡する場合、フラグが「FROM」を表示であることを確認し、示された機首方位に従って飛行してください。これを守らないと、リバースセンシングが発生する可能性があります(HSIには適用されません)。 GPSは、航行に使用される衛星ベースのシステムです。 WAASとLAASは、衛星ベースの航行システムでもありますが、地上ベースのステーションでGPSシステムを補強します。ATCが提供するレーダーサービスは非常に便利であるため、どのフライトでも非常に役立ちます。
本レッスンの各項目をレビューすること
- 地上の航行支援施設(VOR / VORTAC、NDB、およびDME)について
- 衛星ベースの航行支援について
- レーダーサービスとその手順について
- 全地球測位システム(GPS)について
参考資料
- FAA-H-8083-3
- FAA-H-8083-15
- AIM